In un interessante documento trovato in rete “Clock Measurements Using the TimePod 5330A with TimeLab and Stable32” si parla in modo molto diffuso del parametro di “sampling interval” del software timelab.
In pratica è un numero che influenza completamente il comportamento del software, definendo la ENBW (Equivalent Noise Bandwidth) ed il numero di campioni che sono necessari per completare la misura. Nello specifico del 53131 e simili: “specifies the gate or other measurement interval for which the counter is configured. This period is treated as the tau0 basis, which defines the leftmost edge of any deviation plots”.
Quindi, se io volessi fare delle misure dei miei segnali a 10MHz usando un “sampling interval” maggiore (e sempre deterministico), dovrei alimentare il connettore di “external arming” con un segnale che possa triggerare la lettura e che abbia frequenza di 1Hz, 10Hz, 100Hz o 1000Hz. Perfetto. Vale la pena di fare un tentativo, mica sarà difficile generare un impulso. Nel documento “High Resolution Phase Measurement with Keysight 53230A” (sito www.efos3.com) si menziona un esperimento simile, nel quale, per realizzare il trigger per il counter, è stato usato un generatore HP di ottima qualità. Io devo arrangiarmi con quello che ho. I parametri della forma d’onda sono: ampiezza almeno 4V, durata dell’impulso 200ns.
Prima prova: uso il generatore interno dell’oscilloscopio Tektronix. Niente, non è possibile generare un impulso con durata inferiore a 10ms per via della limitazione in banda del sistema. Vabbè, prendo un pulse generator dall’armadio dei “dimenticati”. Trovo un HP 8011A, che vorrei mettere come soprammobile nel mio studio (lo farò), solo per le targhette di ispezione firmate a mano. Lo accendo ma l’unica cosa che genera è tanto calore. Andrebbe fatto un service molto accurato ma non è proprio il momento. Accanto a questo cimelio ho trovato un GwInstek del 1995 che non si accende. Inizio ad essere un po’ “frustrato” e chiedo in giro: un collega mi dice di avere usato uno strumento veramente versatile LiquidInstruments Moku:Go. Un “ciaffetto” che sta nel palmo della mano e consente di fare (SDR) un sacco di cose tra le quali la generazione di segnali arbitrari.
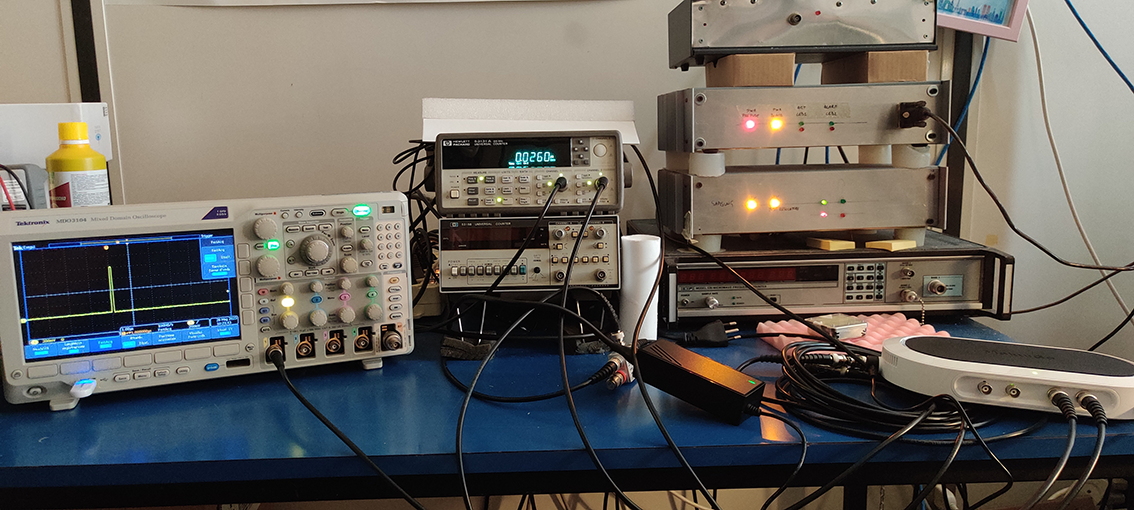
Moku:Go sia! Scarico il software, collego lo strumento al PC, aggiorno il firmware (20 minuti) e poi mi metto a fare delle prove di generazione, collegando ad una uscita l’oscilloscopio (controllato da rete) ed all’altra uscita il counter. Dopo qualche minuto sono in grado di controllare il trigger del counter, con estrema versatilità.
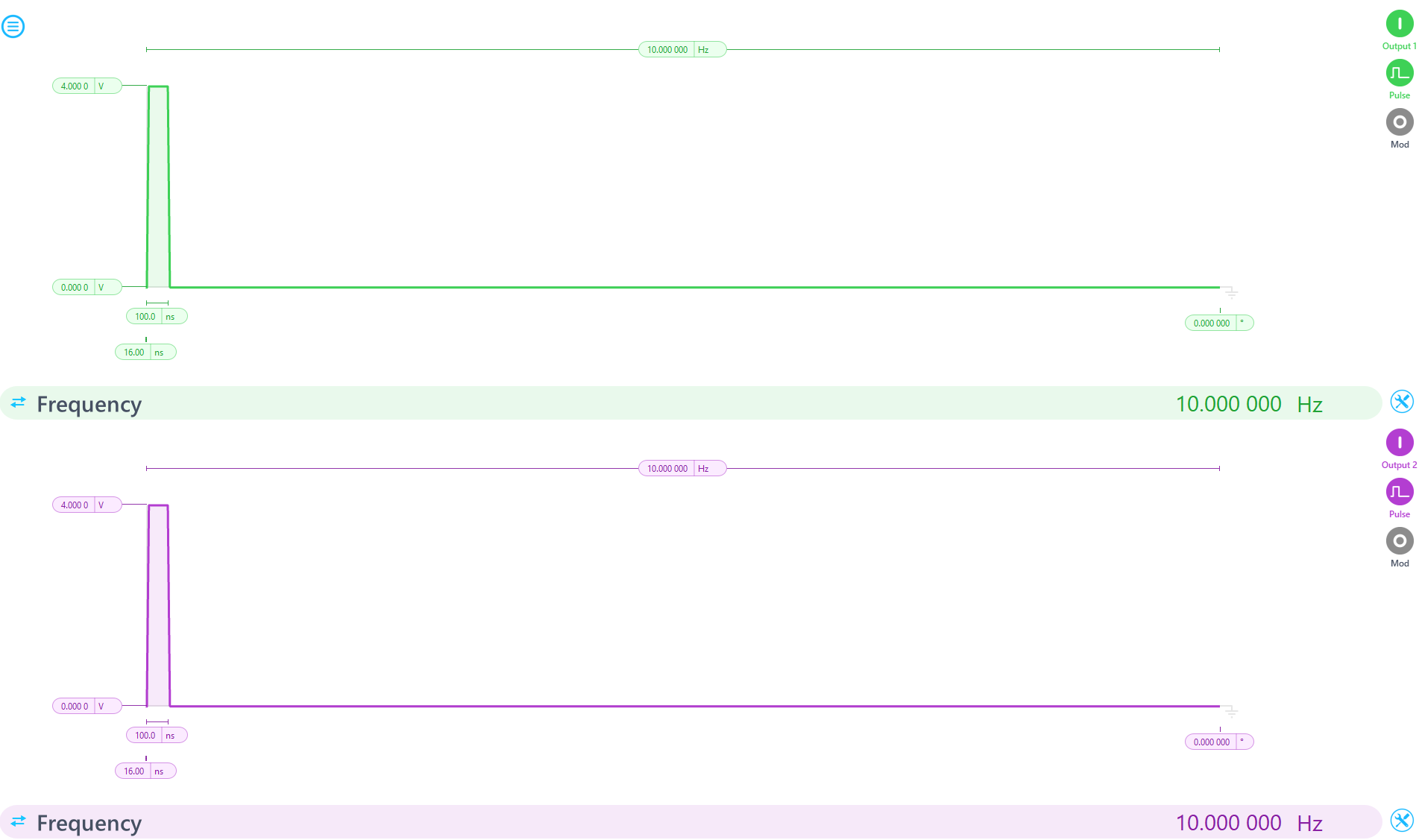

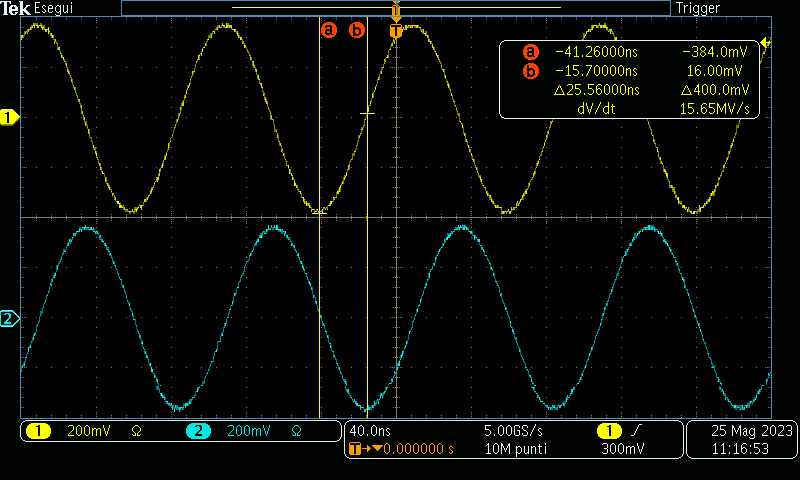
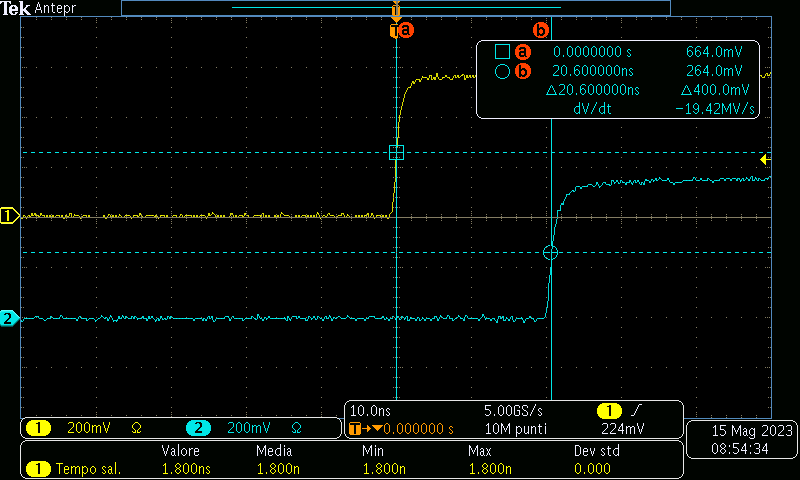
L’impulso generato è anche piuttosto “bello” da vedere e rispetta perfettamente i dati impostati dalla console.

A questo punto non rimane che fare le misure ed aspettare, godendo dello spettacolo di tutti gli apparati.
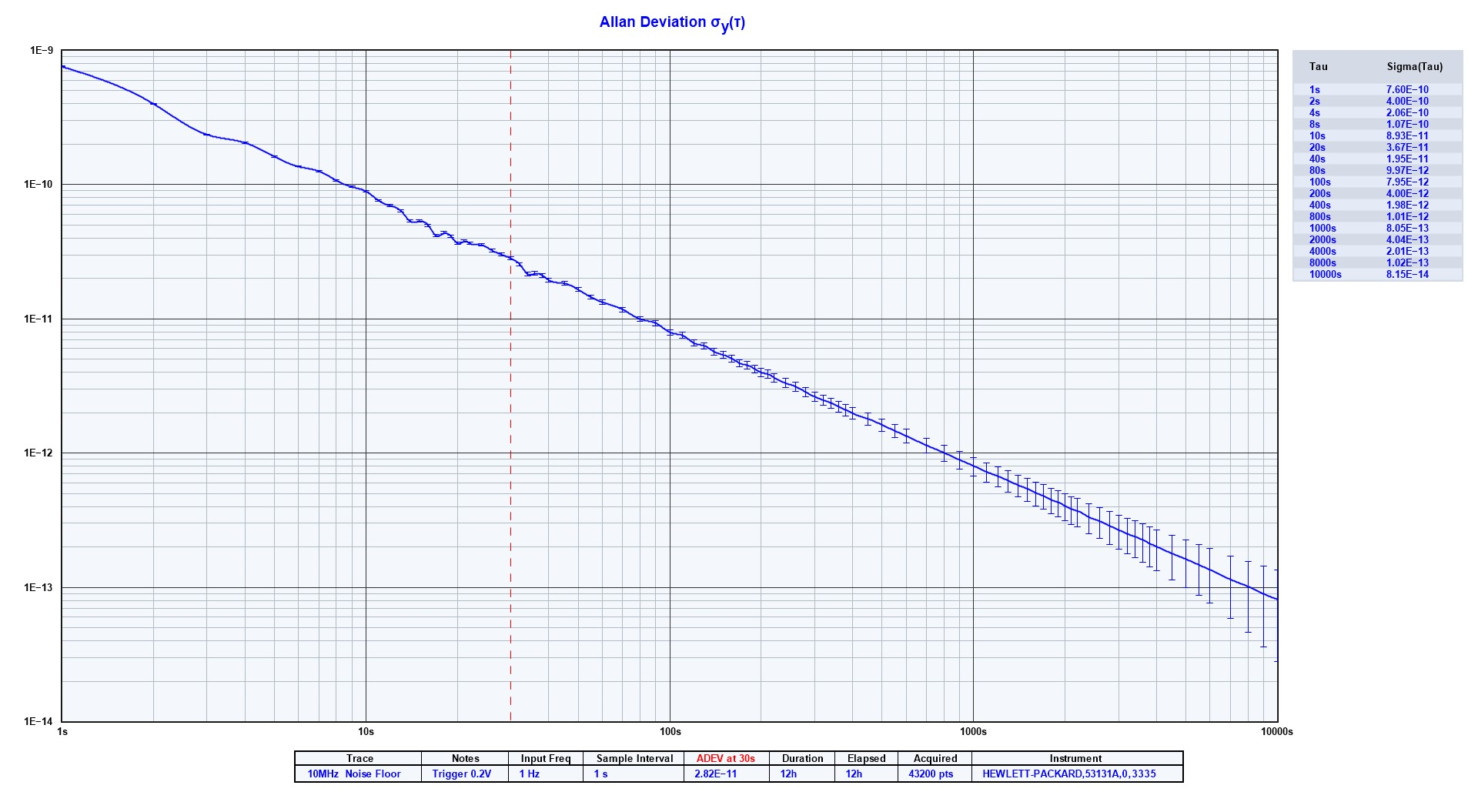
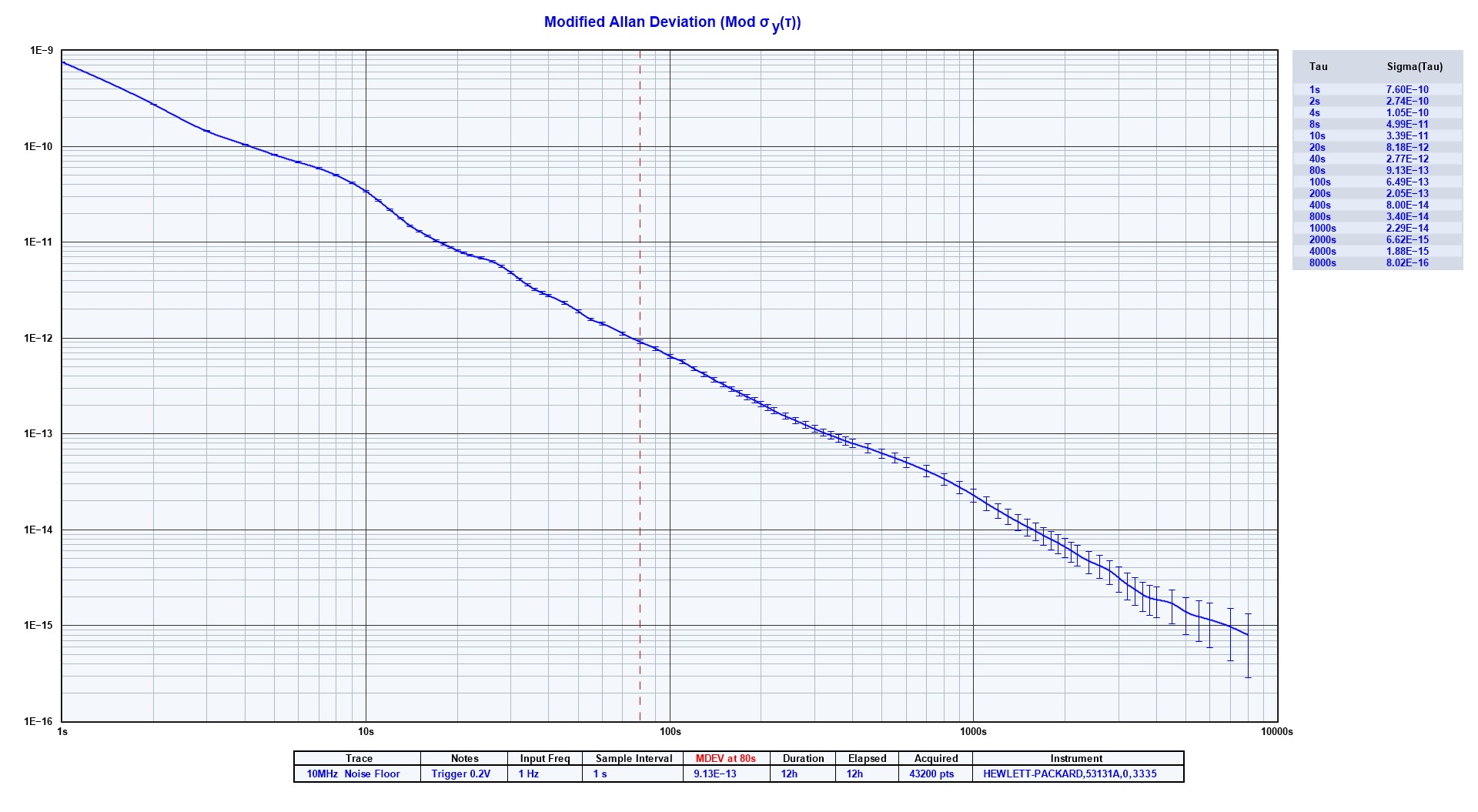
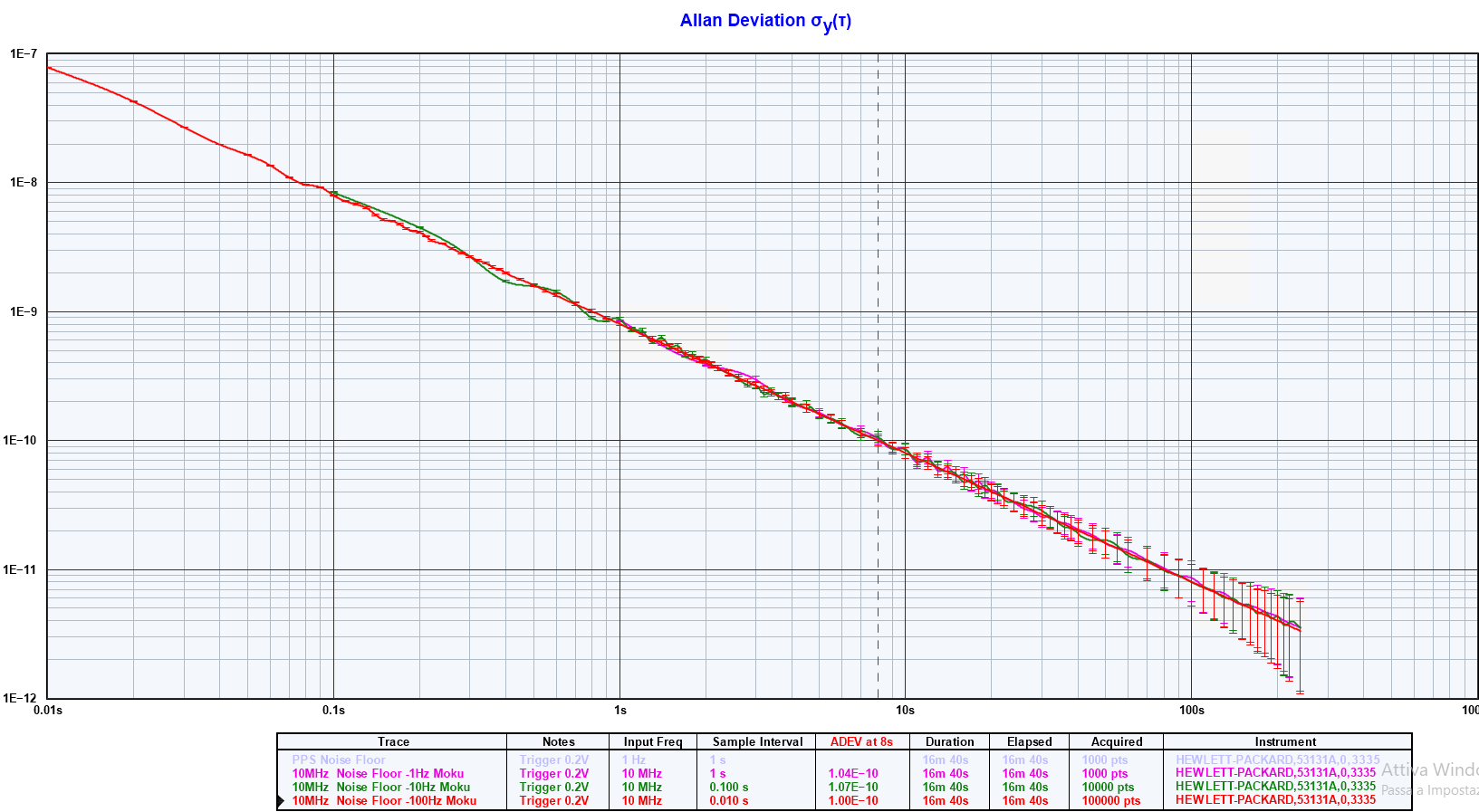
Risultato delle misure: fare una misura con campionamento a 100Hz è uno stillicidio. Devono essere acquisiti 100000 campioni per finire il processo, cosa che richiede una discreta quantità di tempo (quasi un’ora). L’aumento del sample rate, ha come conseguenza il fatto che la ENBW aumenta, pertanto è lecito aspettarsi un comportamento peggiore per le curve acquisite con alto SR. In questo run sono poco apprezzabili.
| tau / sgma(tau) | 1Hz | 10 Hz | 100 Hz |
| 1 secondo | 8.73E-10 | 8,83E-10 | 8.06E-10 |
| 10 secondi | 8.62E-11 | 8.56E-11 | 8.03E-11 |
| 100 secondi | 8.67E-12 | 8.05E-12 | 8.03E-12 |
Durante il test sono cambiate le condizioni climatiche della stanza, con la temperatura che è salita di circa 1 grado. La misura effettuata con sampling a 100Hz mostra un andamento molto regolare, con il maggiore averaging che mitiga l’effetto del crosstalk presente, ma peggiora le prestazioni.
Ci siamo quasi. Tutto è (quasi) pronto per fare una prima misura di un quarzo. Anche se sorgono notevoli interrogativi….