Ogni tanto è utile fare un po’ di ordine (mentale, sul banco di lavoro proprio non ci riesco) per prendere la rincorsa ed affrontare nuove sfide con maggiore consapevolezza. Il punto è questo: ho parecchia carne al fuoco per migliorare le prestazioni del mio “timelab”. Si tratta di una serie di progetti che vanno nella stessa direzione ma… quale è la meta finale?
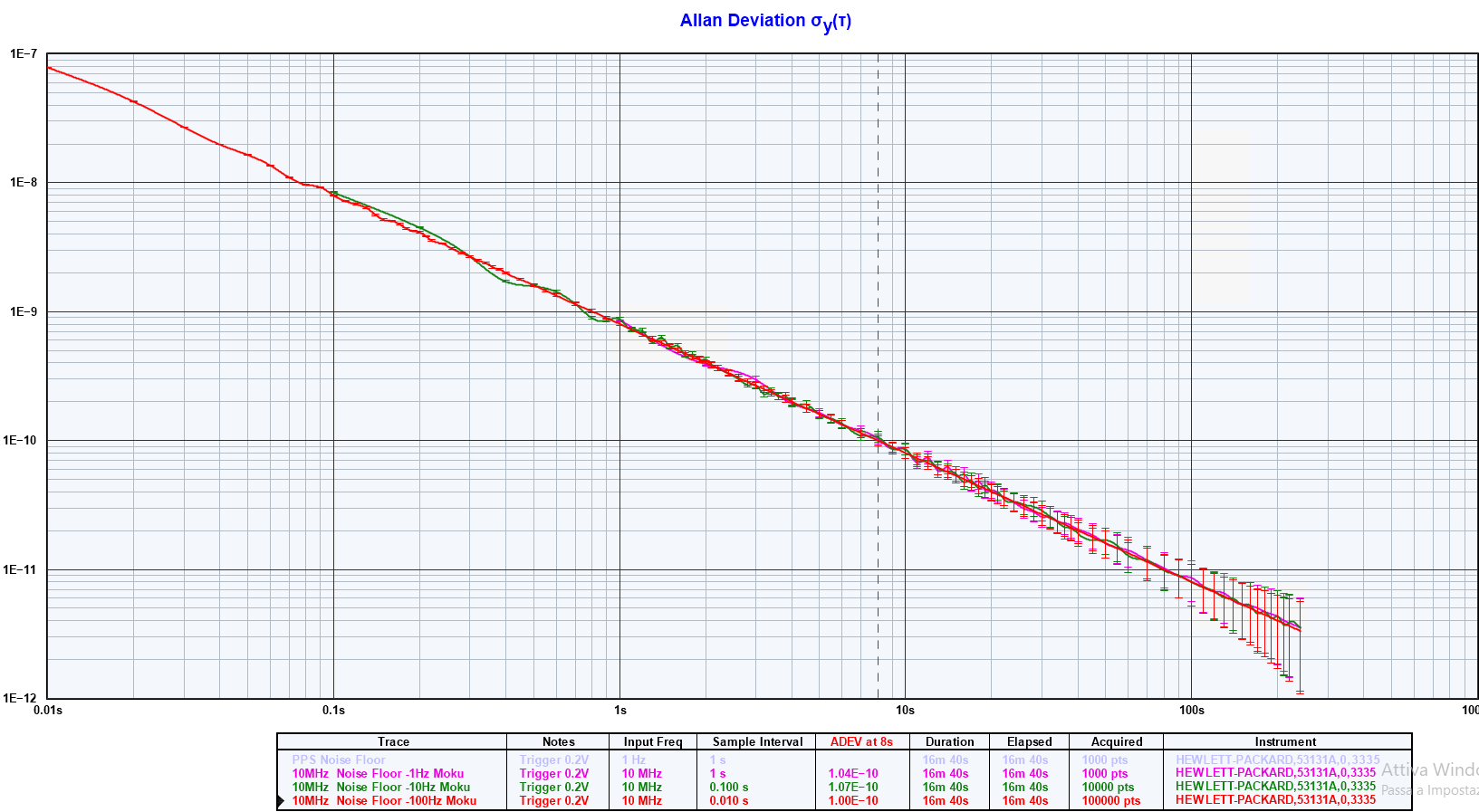
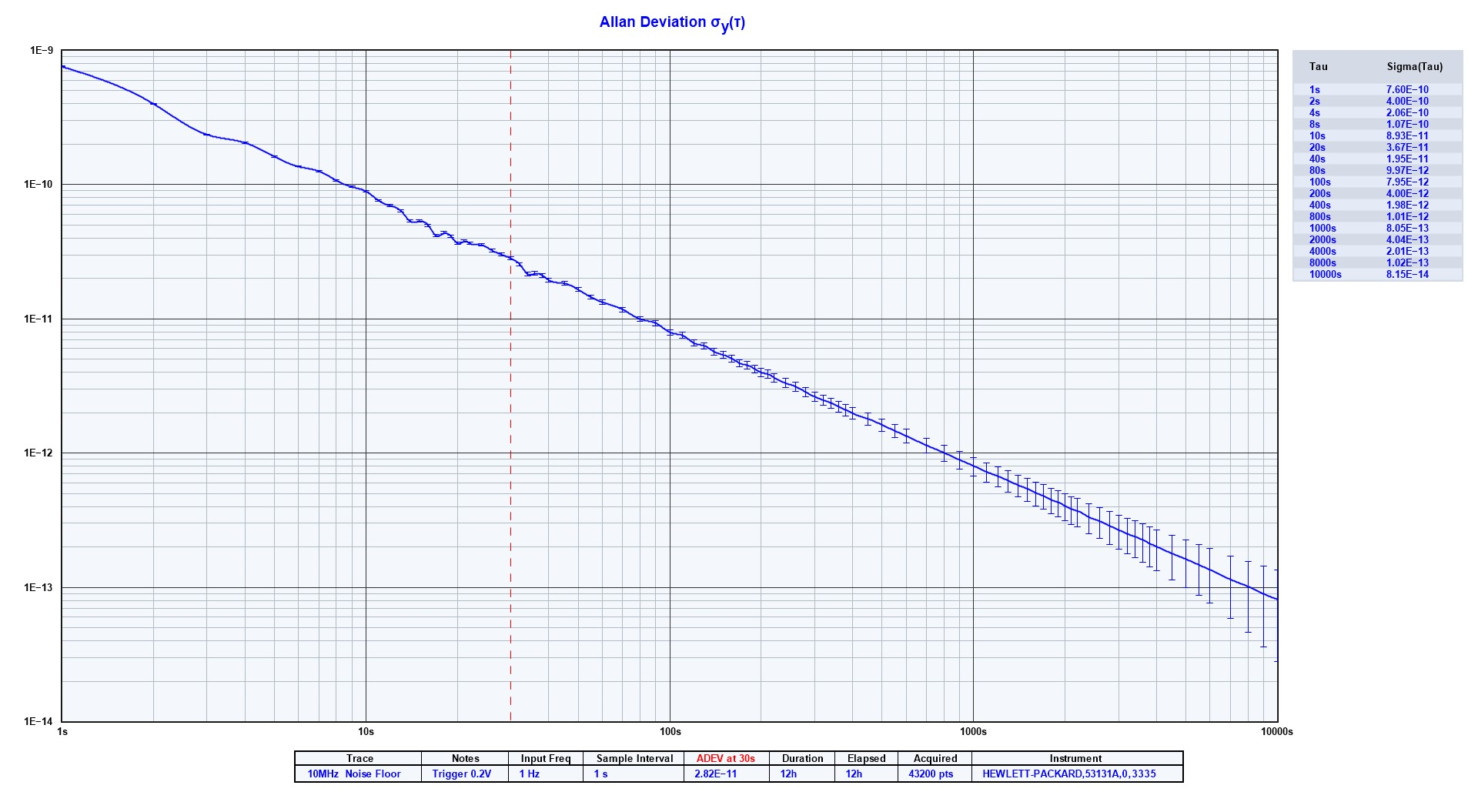
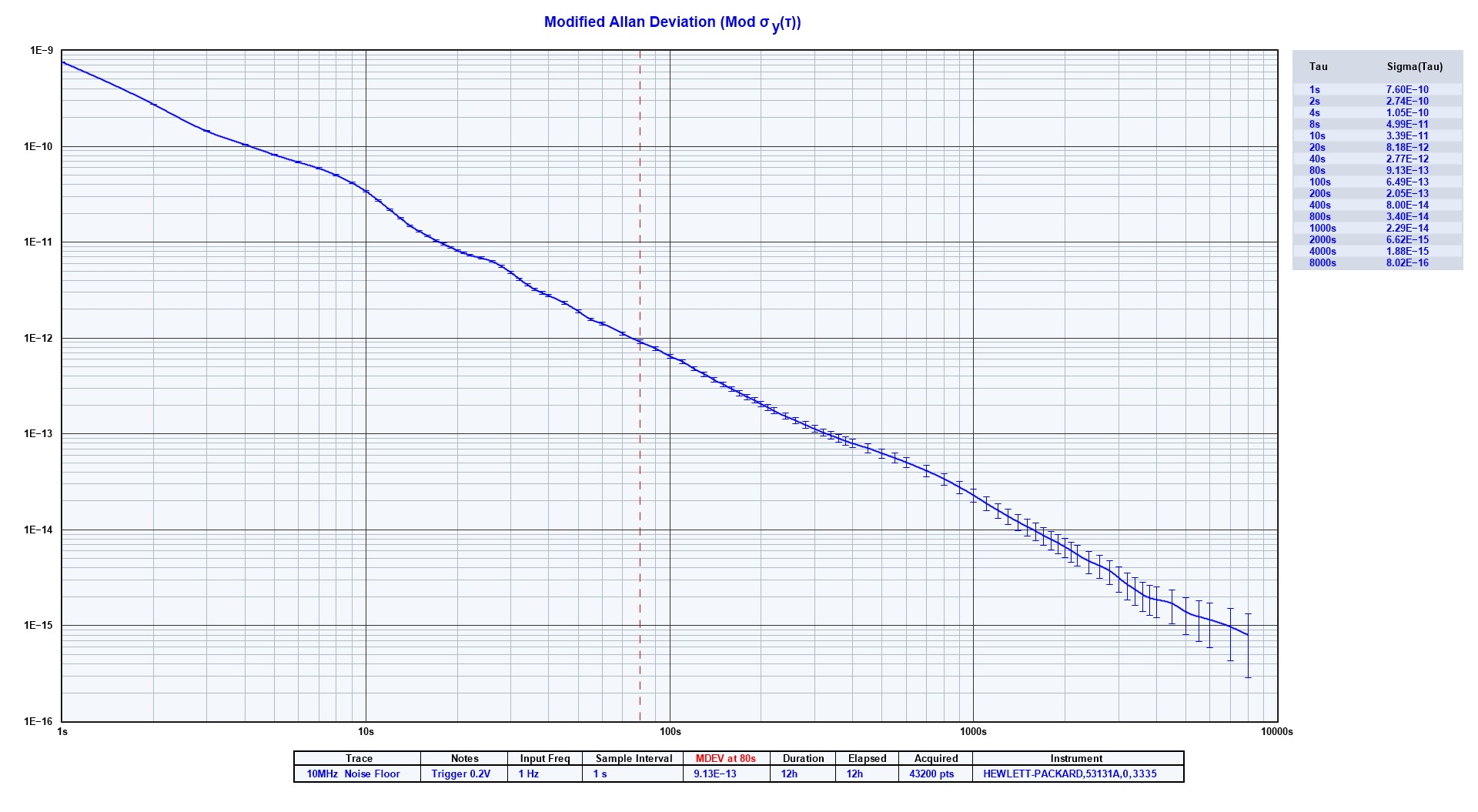
Lo scopo del gioco è fare delle misure di ADEV che siano sempre meno affette da rumore e che mi consentano di confrontare tra loro dispositivi piuttosto eterogenei. Ho a disposizione diversa strumentazione (non è il massimo sul mercato ma… è gratis) e devo ottimizzare tutto quello che “gira” intorno agli strumenti. Partiamo dalla base: cosa è la deviazione di Allan? Un articolo di John Ackermann (N8UR) spiega la cosa in modo delizioso e dimostra (se ce e fosse bisogno) che per spiegare bene alcuni concetti, è necessario essersi sporcati le mani ed averci speso molto tempo:
– articolo originale
– repository github
– il mondo “febo.com”
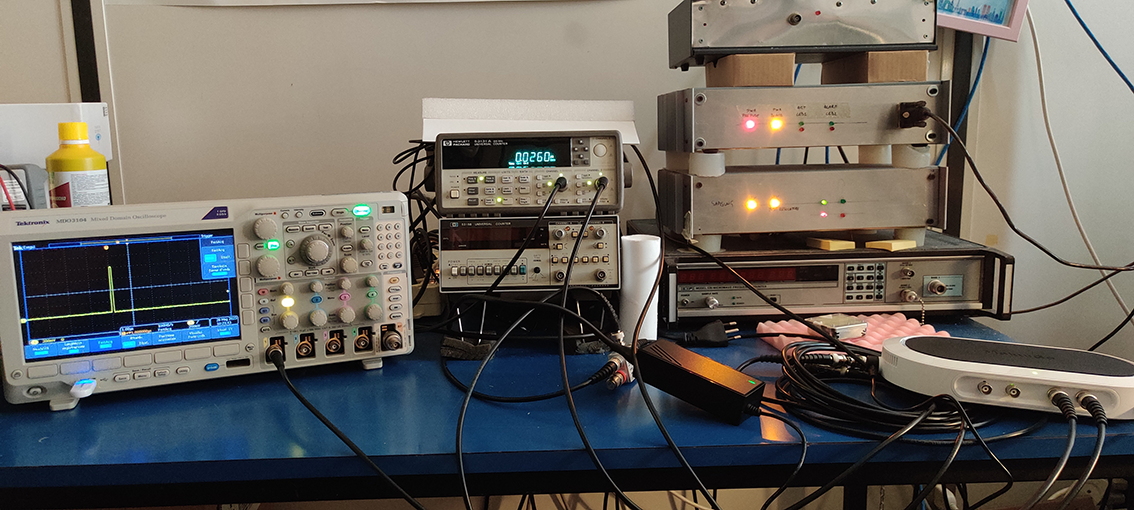
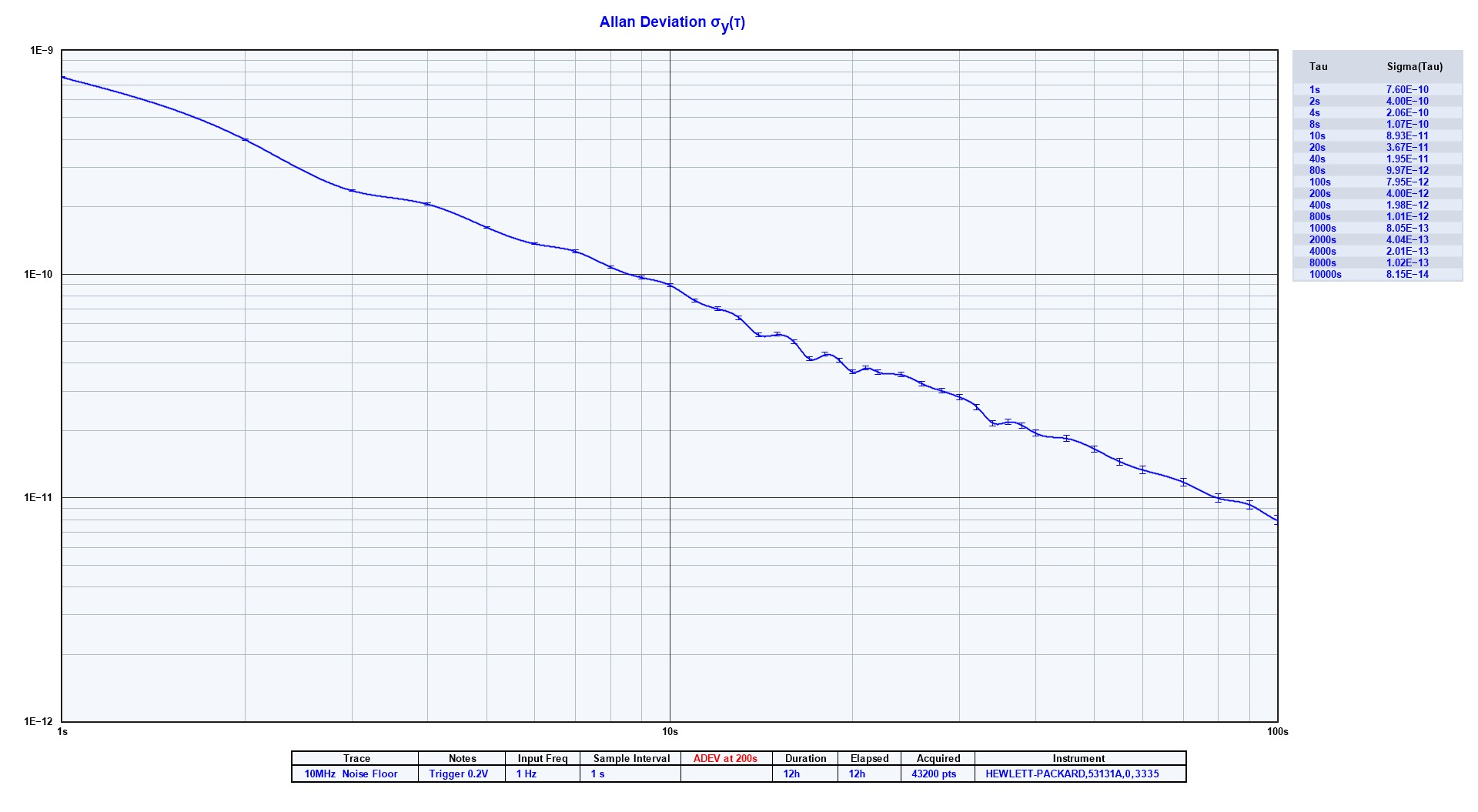
Per fare una misura di ADEV possono essere utilizzati apparati dedicati (spesso estremamente costosi) oppure dei normali frequenzimetri / contatori. In questo caso occorre stare attenti al modo in cui viene effettuata la misura: lavorare in frequenza può essere un problema per via degli algoritmi di averaging che sono implementati internamente ad alcuni frequenzimetri (HP53131/132), e che sono discussi QUI e documentati nella letteratura.
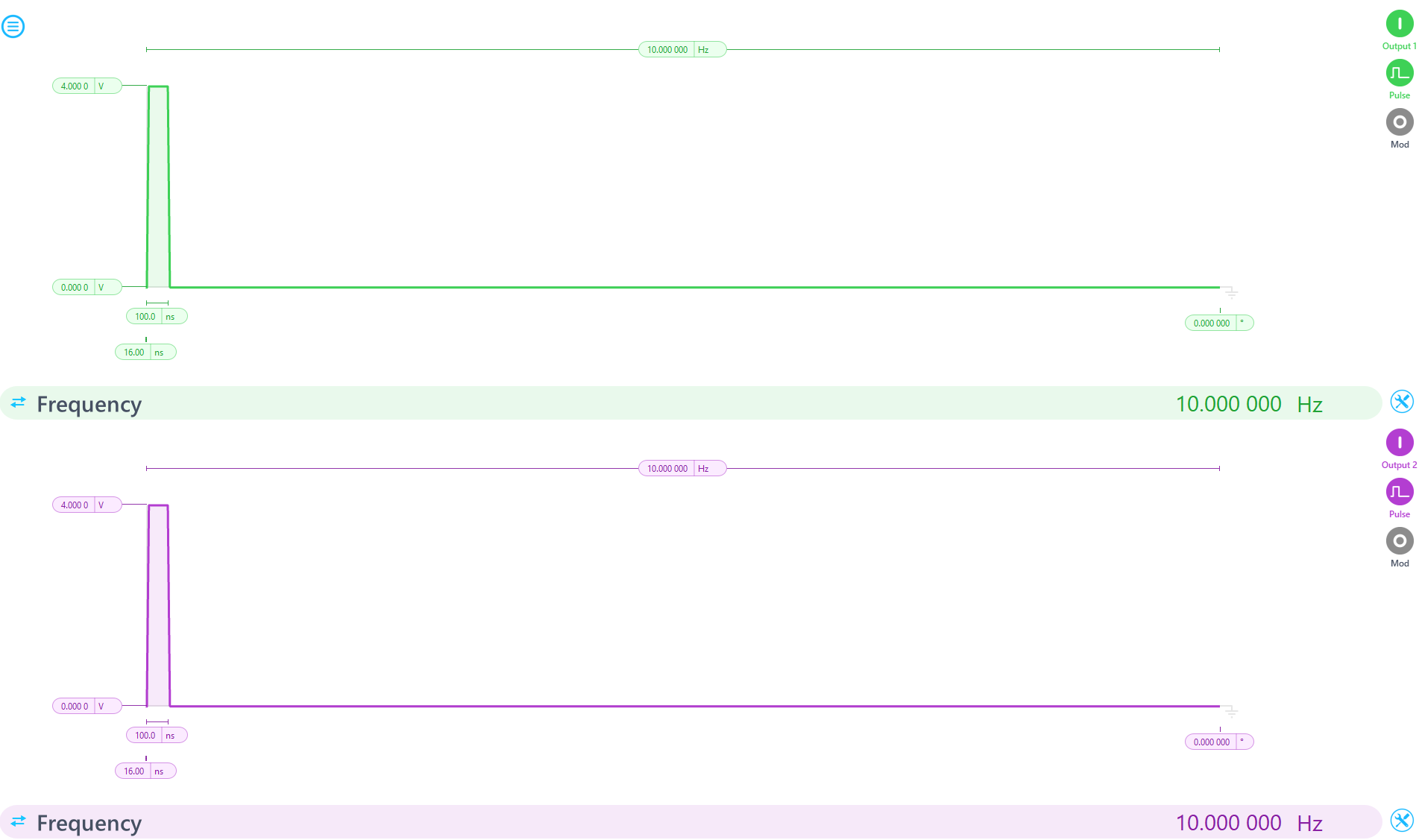
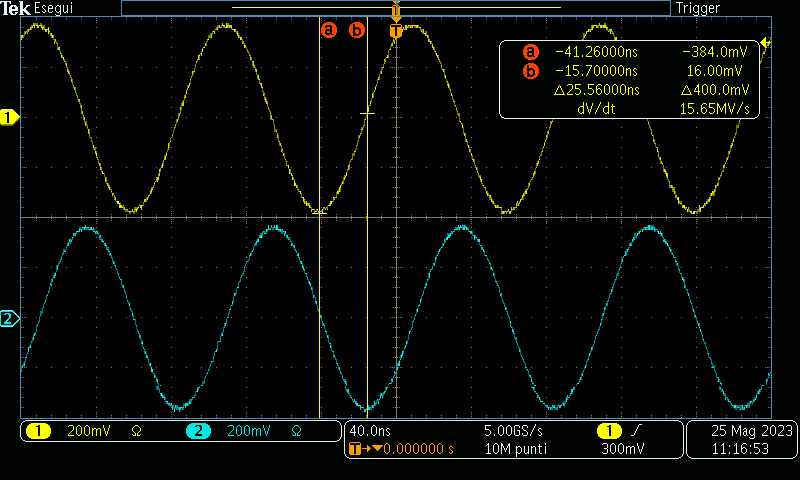
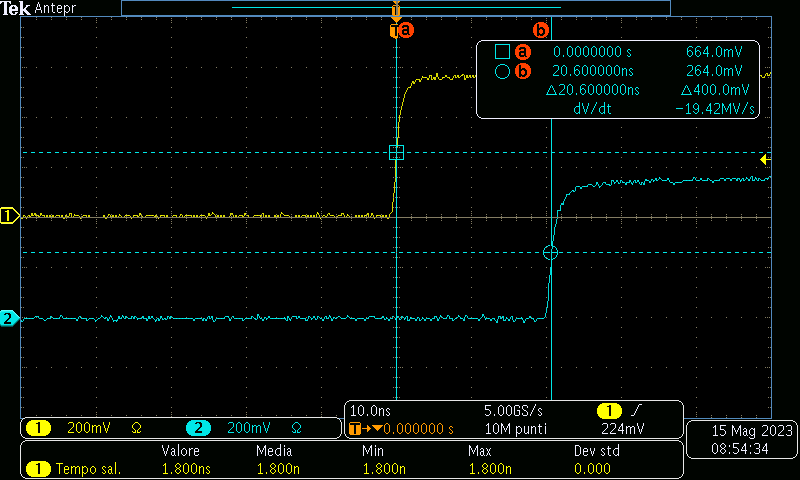
Malgrado il Time Counter non sia il modo migliore per fare questa misura, bisogna accontentarsi, sapendo quali sono i limiti della strumentazione (risoluzione 500ps, che sono 5E-10s) e cercando di lavorare nel tempo, usando cavi di buona qualità. Pertanto è necessario dotarsi di un dispositivo che converta il segnale sinusoidale a 10MHz di uscita da un generatore, in un segnale PPS ( 1 impulso al secondo, 1Hz), in modo da aggiungere meno rumore possibile alla catena.
Ci sono un paio di soluzioni a questo problema, una è quella di acquistare un prodotto “pronto” dal sito TAPR, il TADD-2 mini. Costa una sciocchezza, il funzionamento è comprovato e il form factor è davvero piccolo. Una ottima scelta, peccato che le spese di spedizione sia davvero folli.
Alternativa è quella di andare direttamente all’obbietivo usando un PIC senza troppa elettronica di contorno, come spiegato nella pagina del picDIV. Da notare che il TADD altro non è che i picDIV in un contenitore migliore e con un po’ di elettronica di contorno.
Ultima spiaggia è quella di replicare l’ottimo progetto di Anders Wallin, un metrologo che ha mille interessi e tanti bei progetti. In pratica ha realizzato un TADD aggiungendo uno stadio di alimentazione dignitoso e dei buffer di uscita. Il progetto si chiama PICDIV_Board_V3 ed è un peccato che non sia replicabile 1:1 in quanto alcuni componenti sono out-of-stock. Sto lavorando per crearne una versione reingegnerizzata, più piccola (meno costosa) e con componenti aggiornati.
In ultimo manca un buon oscillatore di riferimento. Ma per questo farò un post dedicato, visto che mi sono attrezzato con un oscillatore al rubidio che non ho ancora avuto modo di accendere (giuro che ne riparleremo).
La destinazione è chiara: misurare decentemente ADEV con il counter. I limiti sono noti (500ps di risoluzione – cavi di segnale non adeguati), gli strumenti che mancano sono in via di approvvigionamento/definizione. Piano piano… arriveranno anche i risultati.